

B-dot Finite-Difference Controller
このコンテンツはまだ日本語訳がありません。
B-dot detumbling controller implemented as a WebAssembly Component guest plugin for the orts simulator. This is the first end-to-end example of the Phase P plugin architecture: a spacecraft attitude controller written in Rust, compiled to a .wasm Component, loaded by the orts host via wasmtime + Pulley interpreter, and driven through the PluginController trait.
How it works
Section titled “How it works”The guest implements the orts:plugin/controller WIT interface:
init(config)— accepts a JSON config blob to set the gain, max moment, and sample periodupdate(observation)— receives the spacecraft state + epoch at each sample tick, queries the host’s geomagnetic field model via thehost-env.magnetic-field-eciimport, computes the finite-differencedB/dtin the body frame, and returns aCommand::MagneticMoment(m)to the host- The host applies the command to a
CommandedMagnetorqueractuator and integrates the next zero-order-hold segment
The control law is the standard finite-difference B-dot:
clamped per-axis to ±max_moment. On the first sample, the command is zero (no previous measurement).
Building
Section titled “Building”# Install cargo-component if not already:cargo install cargo-component
# Add the WASM target (cargo-component uses wasip1 adapter internally):rustup target add wasm32-wasip1 --toolchain 1.91.0
# Build the guest component:cargo +1.91.0 component build --releaseThe output is target/wasm32-wasip1/release/orts_example_plugin_bdot_finite_diff.wasm (~70 KB).
Running with CLI
Section titled “Running with CLI”Run the simulation using a TOML config file:
# orts-cli should be built with plugin-wasm featureorts runorts.toml specifies spacecraft parameters, WASM plugin path, and controller gain. You can tweak control parameters by editing the config without recompiling the .wasm.
Running the simulation sweep
Section titled “Running the simulation sweep”From the orts workspace root:
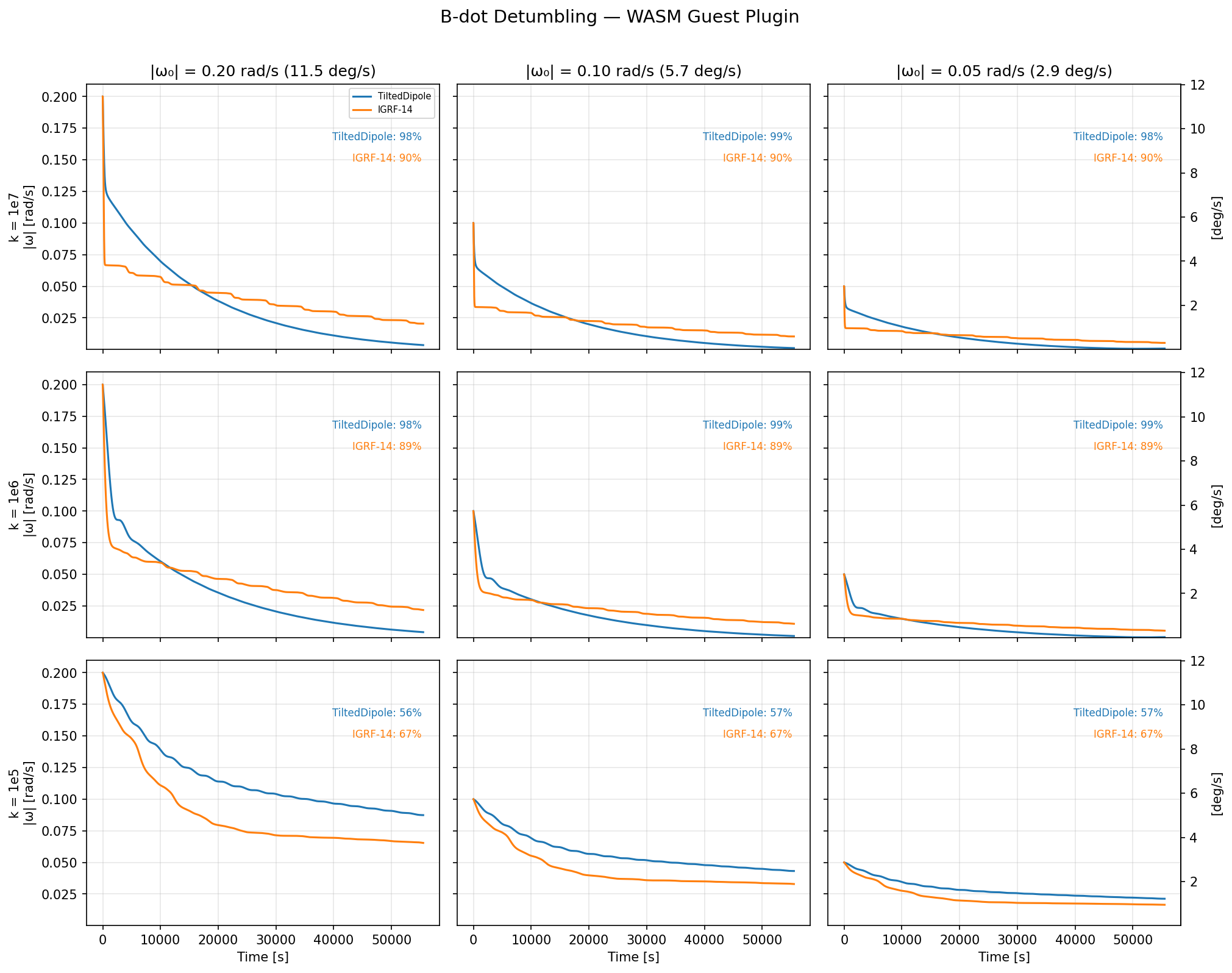
cargo run --example wasm-bdot --features plugin-wasm --releaseThis sweeps gain × initial angular velocity × magnetic field model (3×3×2 = 18 conditions) over ~10 orbits (55,500 s) of simulated time and writes CSV files here. Both TiltedDipole and IGRF-14 magnetic field models are compared. Each CSV has columns t, omega_x, omega_y, omega_z, omega_mag.
Plotting
Section titled “Plotting”cd plugin-sdk/examples/bdot-finite-diffuv run plot.pyProduces a gain × initial-ω matrix plot:
Oracle test
Section titled “Oracle test”The host-side oracle test (orts/tests/oracle_plugin_wasm_bdot.rs) loads this guest and compares its trajectory against the native orts::attitude::BdotFiniteDiff controller. Both implementations compute the same finite-difference B-dot law but via independent code paths (the guest uses a hand-rolled quaternion rotation and calls host-env.magnetic-field-eci for the magnetic field, while the native controller uses nalgebra and calls TiltedDipole::field_eci directly). The oracle asserts that the final quaternion and angular velocity agree within 1e-12 tolerance.
cargo test -p orts --features plugin-wasm --test oracle_plugin_wasm_bdotConfiguration
Section titled “Configuration”The guest accepts a JSON config blob via init:
{ "gain": 1e4, "max_moment": 10.0, "sample_period": 1.0}All fields are optional (defaults are shown above). The host passes this string at WasmController::new(pre, label, config).