

constellation-phasing — In-Plane Phasing Demo
同じ WASM plugin を複数衛星に割り当て、放出直後にまとまっている衛星群を軌道面内に 差動 drift で展開する様子を示す example。
- 同一 plugin の共有: 全衛星に同じ
.wasmを割り当てる - 衛星ごとに異なる config:
raise_delay_sを衛星ごとに変えるだけで phase 差が生じる - 衛星ごとに独立した state: 各衛星は独自の
Storeと worker thread/task を持ち、 WASM 内部 state が互いに干渉しない
Multi-sat WASM plugin の裏側
Section titled “Multi-sat WASM plugin の裏側”この example は orts engine 側の multi-satellite サポートに依存している。
- Component の共有 (orts/src/plugin/wasm/cache.rs):
WasmPluginCacheは.wasmのファイルパスをキーにして Component をキャッシュする。 複数衛星が同じパスを指定していれば、コンパイルは 1 回で済み、全衛星で同じ Component を共有する。 キャッシュのキーは単純なパス一致なので、symlink や相対パスの違いは別物として扱われる 点に注意。 - 状態の隔離 (orts/src/plugin/wasm/sync_controller.rs):
sync backend では衛星ごとに専用の OS thread と
Storeを持つ。 async backend (orts/src/plugin/wasm/async_controller.rs) では worker thread pool を共有しつつ、衛星ごとに独立した tokio task で動かす。 - 衛星ごとの
TickInput(cli/src/sim/controlled.rs): engine は衛星ごとに専用のTickInputを組み立てて plugin に渡す。衛星 A の controller から 衛星 B のセンサ値は見えない。
仕組み: 差動 drift による in-plane phasing
Section titled “仕組み: 差動 drift による in-plane phasing”prograde にしか噴射できない推進器でも、軌道面内の phase 差を作り出すことはできる。
- 全衛星は parking 軌道(高度 350 km)の同じ位置から出発する
- 衛星ごとに固有の
raise_delay_sだけ parking 軌道に留まる - parking 軌道は半径が小さく周期が短いため、留まっている衛星は先に上昇した衛星より 軌道面内で前方に drift していく
raise_delay_sが経過したら Hohmann 遷移で operational 軌道(高度 550 km)へ上昇するraise_delay_sの違いが、そのまま operational 軌道上の phase offset として残る
drift rate と delay の計算
Section titled “drift rate と delay の計算”parking / operational 軌道の平均運動は
で、r_park = R_earth + 350 km = 6728 km、r_op = R_earth + 550 km = 6928 km。
その差から drift rate は
となる。目標 phase offset Δφ を稼ぐのに必要な delay は
となり、90° (π/2 rad) を稼ぐには 約 31900 s(およそ 8.9 時間) かかる。
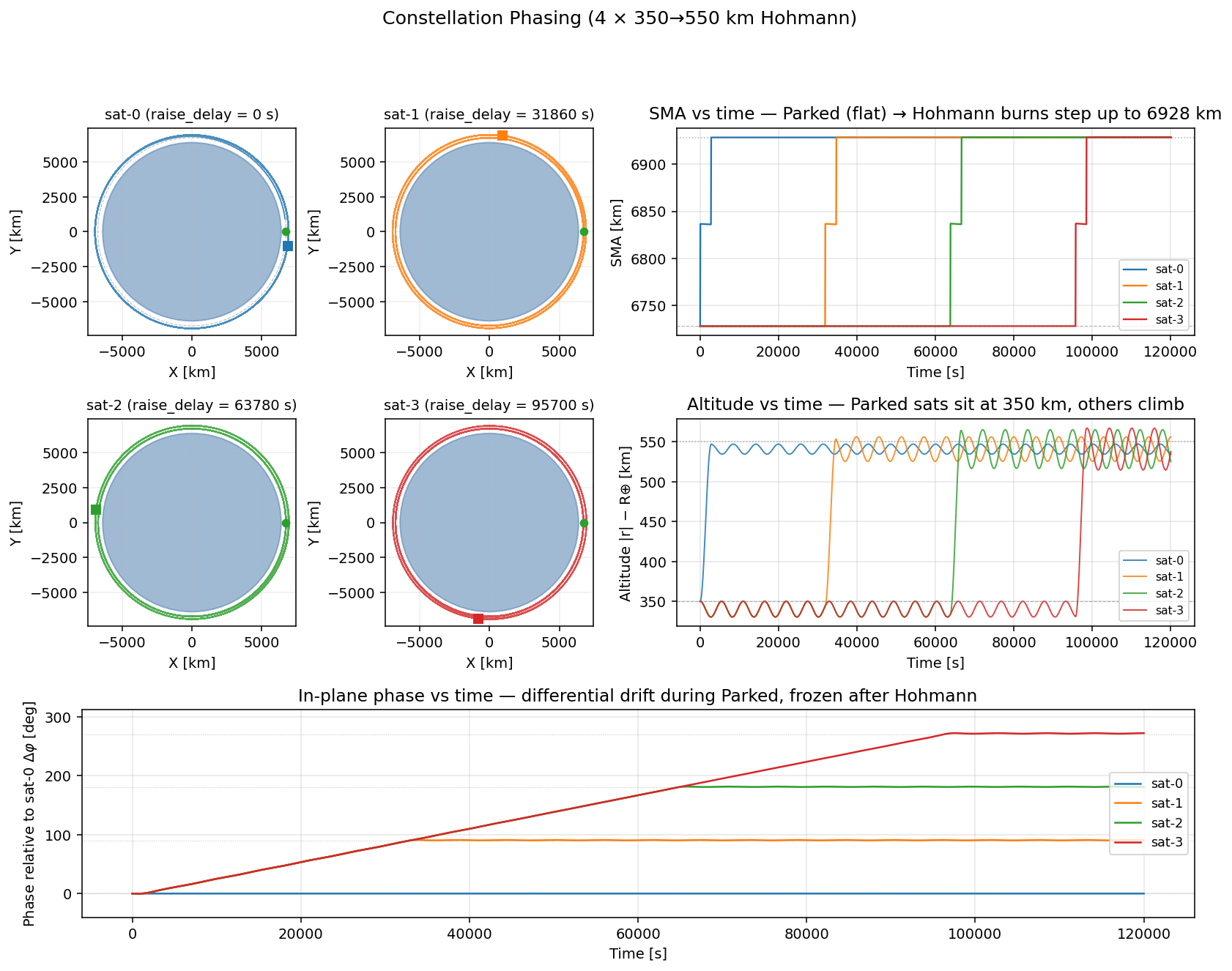
4 衛星を 0° / 90° / 180° / 270° に配置するなら raise_delay_s = [0, 31900, 63800, 95700]。
duration は max(raise_delay_s) + T_Hohmann/2 + buffer を確保すれば足りる。
本 example では 120000 s(約 33 時間) にしている。
State Machine
Section titled “State Machine”transfer-burn-with-tcm の state machine の
先頭に Parked phase を追加した構成。
stateDiagram-v2
[*] --> Parked : raise_delay_s > 0
[*] --> FirstBurn : raise_delay_s = 0
Parked --> FirstBurn : t ≥ raise_delay_s
FirstBurn --> Coast : SMA ≥ transfer_SMA
Coast --> SecondBurn : elapsed ≥ T_transfer / 2
SecondBurn --> Trim : SMA ≥ target_r
Trim --> Trim : SMA ≥ target_r − deadband
Trim --> Trim : SMA < target_r − deadband<br>(throttle = 1, TCM)
- Parked:
t < raise_delay_sの間は throttle = 0。ただし姿勢制御(body-Y を prograde に向ける PD + RW)は動かしている。 - FirstBurn / Coast / SecondBurn / Trim: transfer-burn-with-tcm と同じ Hohmann のロジック。Parked → FirstBurn に遷移した時点の parking 軌道半径を使って transfer ellipse のパラメータを計算しなおす。
cd plugin-sdk/examples/constellation-phasingcargo build --target wasm32-wasip2 --release# -> ../target/wasm32-wasip2/release/orts_example_plugin_constellation_phasing.wasm以下のコマンド例は orts CLI が PATH に入っている前提。
インストールしていなければ cargo run --release -p orts-cli -- run ... で代用できる。
orts run --config orts.toml --output phasing.rrd# 4 衛星 × 120000 s で wall-clock 2〜3 分程度。dt=1.0 と粗めに積分して速度を稼いでいる。結果の可視化は rerun phasing.rrd か viewer/ で。
matplotlib で plot したい場合は CSV に変換してから:
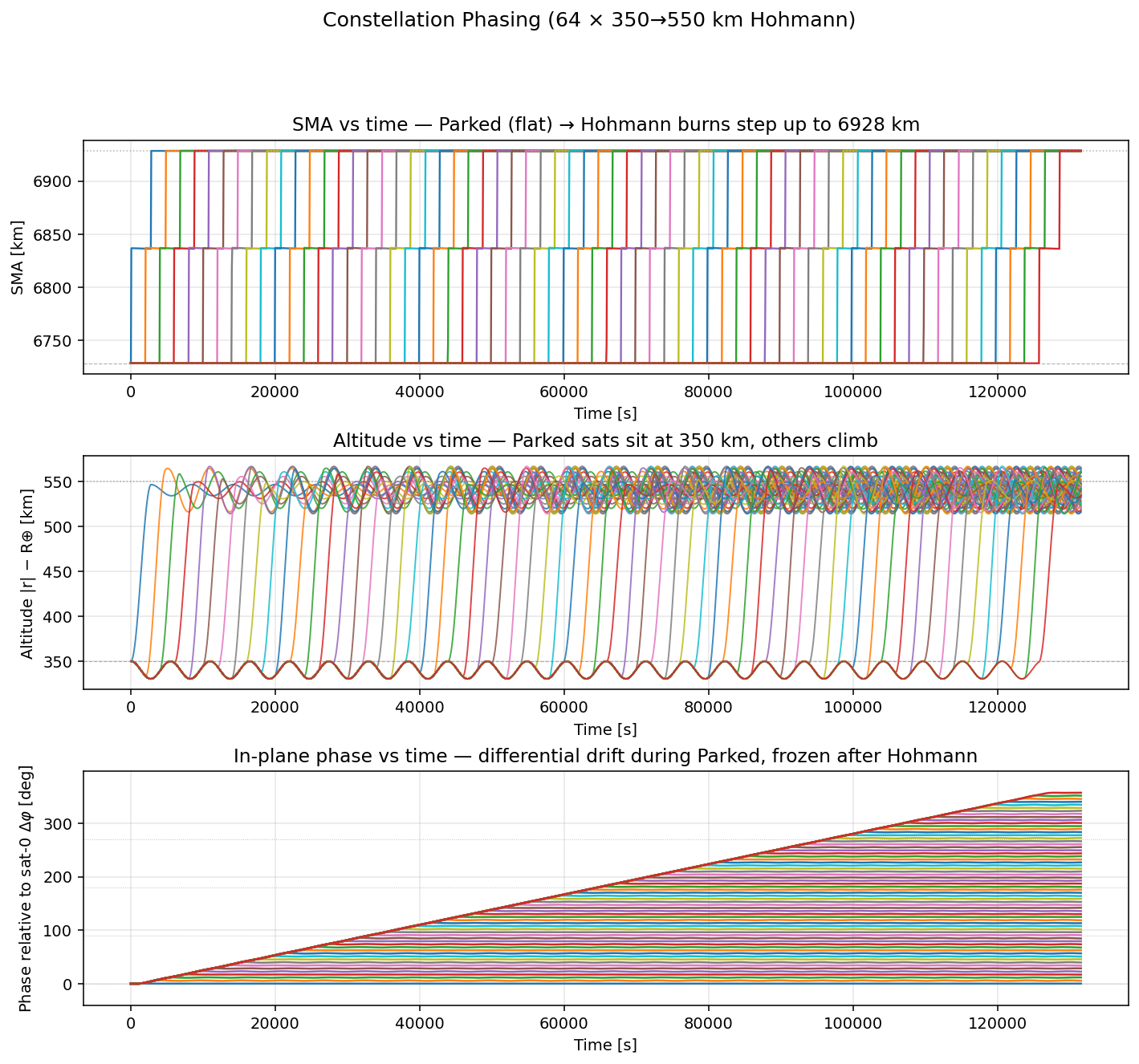
orts convert --format csv phasing.rrd --output phasing.csvuv run plot.py # or: python3 plot.py# -> constellation_phasing.pngplot.py は各衛星の ECI XY 軌道・SMA(t)・altitude(t) と、基準衛星(sat-0)からの
面内 phase 差 Δφ(t) をまとめて 1 枚の図にする。
展開の様子をアニメーションで見たい場合は:
uv run animate.py # or: python3 animate.py# -> constellation_phasing.gifffmpeg があれば palette 最適化で自動的に圧縮する(無ければ素の GIF をそのまま出力)。
plot.py / animate.py は任意の N 衛星に対応している。CSV のパスを引数として
渡せば別のシナリオを可視化できる(衛星ごとの軌道パネルは N ≤ 8 のときのみ描画し、
それ以上では overlay の時系列グラフだけを描く):
# 例: bench の結果 (N=8) を可視化orts convert --format csv /tmp/orts-bench/out_N8.rrd --output /tmp/orts-bench/out_N8.csvpython3 plot.py /tmp/orts-bench/out_N8.csv# -> /tmp/orts-bench/out_N8.png他機数の可視化例
Section titled “他機数の可視化例”4 衛星 demo (orts.toml) と同じ dt=1.0 で、機数だけを変えて回した結果。
衛星 i が operational 軌道上の 360° × i / N の位置に到達するように
(360° / N 間隔の均等配置になるように)raise_delay_s を決めてあり、
duration は最後の衛星が Hohmann を完了するまで確保してある
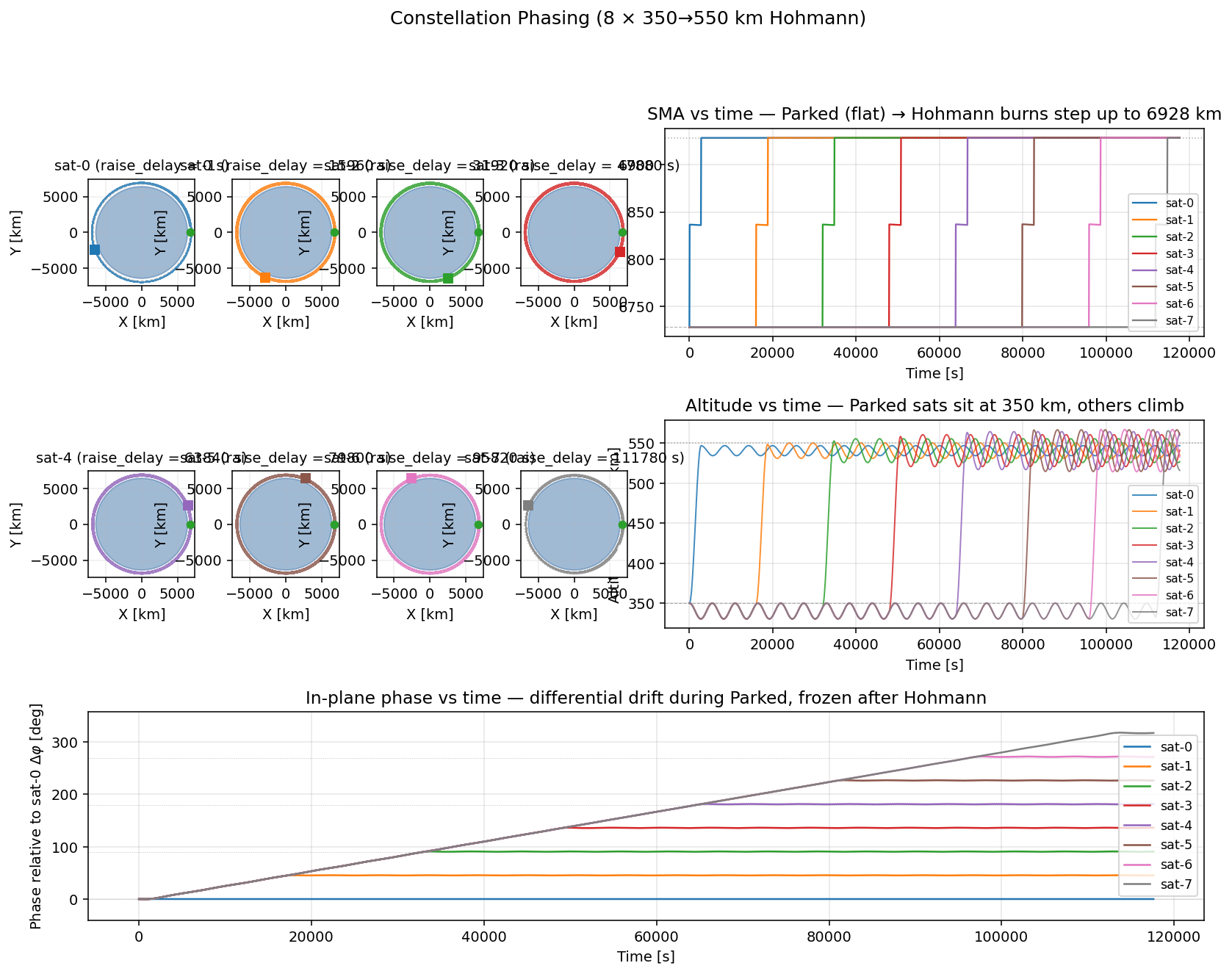
(N=8 で約 118000 s、N=64 で約 132000 s)。
| N=1(短い bench 出力、参考用) | N=8(展開完了まで) |
|---|---|
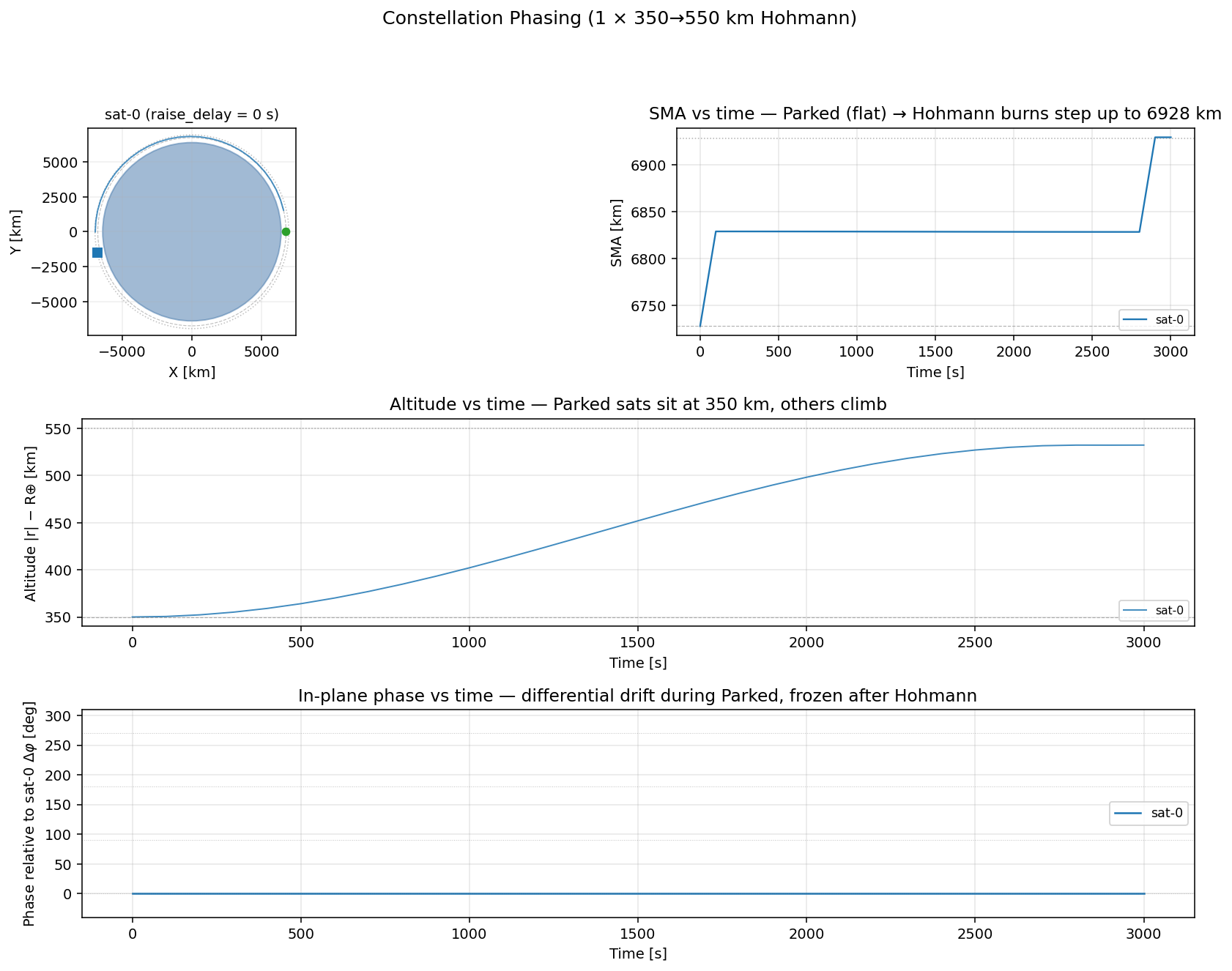 |  |
アニメーションは同じスクリプトで生成:
| N=8 | N=64 |
|---|---|
 |  |
上記の可視化シミュレーションを実際に回したときの wall-clock
(同ホスト、--plugin-backend=auto は sync を選択):
| N | duration [s] | wall-clock | realtime factor |
|---|---|---|---|
| 4 | 120000 | 約 2 min | 約 1000× |
| 8 | 117601 | 3:26 | 約 572× |
| 64 | 131467 | 30:35 | 約 72× |
展開完了まで回しているので、次節の 3000 s 短時間 bench よりは当然時間がかかる。 特に N=64 は 30 分程度必要なので、一度流して結果を repo に commit する運用を想定している。
ベンチマーク(機数 vs 計算速度)
Section titled “ベンチマーク(機数 vs 計算速度)”複数衛星シミュレーションのコストを計測する bench script を同梱している。
./bench.sh [sync|async|auto] [quick|full]# quick: N = 1, 8, 64 / --warmup 1 --runs 3# full : N = 1, 2, 4, 8, 16, 32, 64 / --warmup 2 --runs 7 (README 掲載値)bench は demo とは別の短い duration (3000 s) で controller の scaling だけを測る。
raise_delay_s は [0, 0.9 × duration] に均等分散し、bench 中に Parked→FirstBurn
への遷移を含む全 phase が 1 度ずつ実行されるようにしてある。
bench の出力は bench_plot.py で可視化できる:
python3 bench_plot.py # /tmp/orts-bench/result_*.json をすべてまとめてプロットpython3 bench_plot.py /tmp/orts-bench/result_auto_quick.json # 個別指定も可# -> bench.png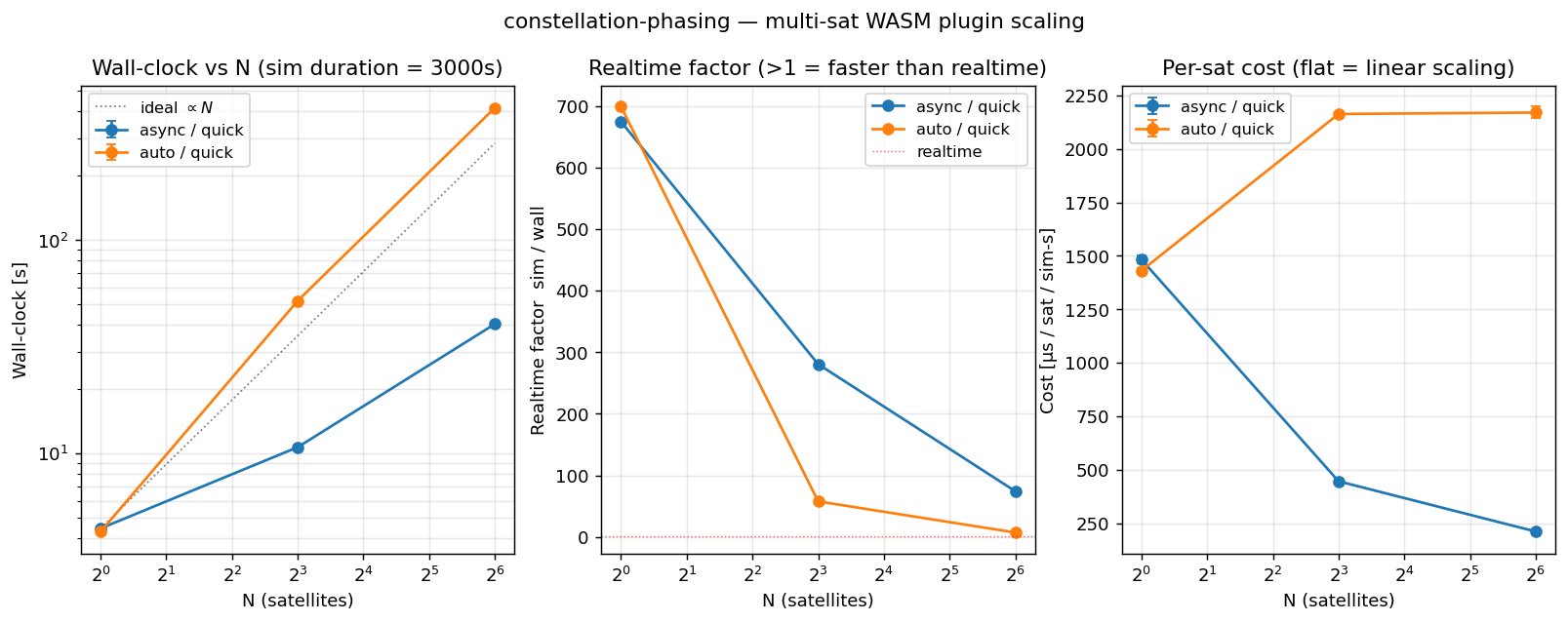
環境: AMD Ryzen 7 3700X (8C / 16T), 94 GB RAM, Linux 6.19 / Arch
計測条件: duration = 3000 s, dt = 0.1, output_interval = 100 s, --warmup 1 --runs 3 (quick mode)
Auto / Sync backend (--plugin-backend=auto)
Section titled “Auto / Sync backend (--plugin-backend=auto)”available_parallelism = 16 の環境では threshold が 16 × 32 = 512 になるので、
本 bench の N ≤ 64 では auto backend は 常に sync backend を選ぶ。
| N | wall-clock [s] | realtime factor | cost [μs / sat / sim-s] |
|---|---|---|---|
| 1 | 4.29 ± 0.04 | 698.8× | 1431 |
| 8 | 51.92 ± 0.24 | 57.8× | 2163 |
| 64 | 416.66 ± 5.29 | 7.2× | 2170 |
Async backend (--plugin-backend=async)
Section titled “Async backend (--plugin-backend=async)”同じ条件を async backend で回した結果。N ≥ 8 では sync に比べて劇的に速い。
| N | wall-clock [s] | realtime factor | cost [μs / sat / sim-s] | vs sync |
|---|---|---|---|---|
| 1 | 4.45 ± 0.05 | 674.7× | 1483 | 0.96× |
| 8 | 10.69 ± 0.24 | 280.6× | 446 | 4.86× |
| 64 | 40.41 ± 0.89 | 74.2× | 211 | 10.31× |
指標の定義:
realtime factor = sim_duration / wall_clock(1 より大きければリアルタイムより速い)cost = wall_clock × 1e6 / (N × sim_duration)(N に依らず一定なら linear scaling)
- async は N に対してほぼ linear scaling(wall-clock 図の ideal O(N) 破線にほぼ重なる)。 cost も N=1→64 で 1483→211 μs/sat/sim-s と減少する。tokio task を worker thread pool で 捌くので、衛星が増えても OS レベルの context-switch overhead がほぼ無い。
- sync は N ≥ 2 から急激に悪化する。cost は N ≥ 8 で ~2170 μs/sat/sim-s に飽和。 1 衛星 1 OS thread の構成なので、16 スレッド機で N=64 は 4 倍の oversubscription に なり、context switch が支配的になっている。
- N=64 での差は ~10×(sync 417 s / async 40 s)。core 数を超える衛星を回すなら async 一択、という結果になった。
- auto backend の切り替え threshold は見直しの余地あり。現在は
available_parallelism × 32(16 スレッドで 512)だが、この bench では N=8 時点で async の方が既に ~5× 速いので、 threshold を core 数(あるいは core 数の数倍)程度まで下げても良さそう (cli/src/sim/params.rs)。 - N=1 では async が僅かに遅い(+0.16 s, 4 %)。runtime の初期化 overhead 分と思われる。
- Full mode の計測はまだ。
./bench.sh async fullで N=1..64 の 7 点を--warmup 2 --runs 7で回すと掲載値として精度が上がる。
- parking より低い target は不可: この plugin は常に body-Y を prograde に 向けるよう姿勢制御しており、retrograde 噴射(軌道を落とす方向の制御)は実装していない。 target altitude が parking altitude より低い設定だと軌道を下げられないので、 FirstBurn に遷移したタイミングで Err を返して衛星を停止する。
- 初期位置:
[satellites.orbit] type = "circular"は true anomaly を指定する インターフェースを持たないため、全衛星は軌道上の同じ位置から出発する (cli/src/satellite.rs)。 本 example の「放出直後まとまっている」シナリオには都合が良い。 - 大きな N での sync backend:
--plugin-backend=syncのまま N を数百以上に 伸ばすと OS thread 数が実用上の限界に近づく。その領域では async backend を使う。