

NOS3 generic_adcs — AOCS FSW SILS Example
NASA NOS3 (Operational Simulator for Space Systems) の generic_adcs コンポーネントの 制御アルゴリズムを WASM Component としてビルドし、orts の SILS (Software-In-the-Loop Simulation) として実行する example plugin。
既存の AOCS フライトソフトウェアの C コードを変更なしで WASM 化し、orts の plugin system で動かすことで、SILS のコンセプトを実証する。
ADCS モード
Section titled “ADCS モード”| Mode | ID | センサ | アクチュエータ | 制御則 |
|---|---|---|---|---|
| Passive | 0 | なし | なし | 制御なし |
| B-dot | 1 | 磁力計 + ジャイロ | MTQ | 磁場微分フィードバック |
| Sun-Safe | 2 | 太陽センサ + ジャイロ | RW + MTQ | PD 制御 |
| Inertial | 3 | Star Tracker + ジャイロ | RW + MTQ | クォータニオン PID |
Prerequisites
Section titled “Prerequisites”cargo-component(cargo install cargo-component)wasi-libc/wasi-compiler-rt(C → wasm32-wasip1 クロスコンパイルに必要)- Arch Linux:
pacman -S wasi-libc wasi-compiler-rt - Ubuntu: wasi-sdk をインストール
- Arch Linux:
- ネットワーク接続 (build.rs が generic_adcs リポジトリを git clone する)
cd plugin-sdk/examples/nos3-adcscargo component buildbuild.rs が自動で以下を行う:
github.com/nasa-itc/generic_adcsをOUT_DIRに git clone (commit pinned)- cFS 依存を除いた standalone
generic_adcs_msg.hシムを自動生成 cccrate で C ソースを wasm32-wasip1 向けにコンパイル
orts runデフォルト設定は B-dot モード (mode 1) で、400km LEO での 10 分間のデタンブリングを実行する。
./test.sh # 全モードテスト./test.sh bdot # B-dot のみ./test.sh sunsafe # Sun-Safe のみ./test.sh inertial # Inertial のみ各モードで角速度ノルムが十分に減衰することを検証する。
Visualization
Section titled “Visualization”以下のプロットは ./test.sh の実行結果。
共通条件:
- 軌道: 400 km LEO 円軌道 (周期 ~5553s)
- 衛星: 慣性テンソル diag(10, 10, 10) kg·m², 質量 500 kg
- 初期姿勢: q = [0.966, 0, 0.259, 0] (15° off-nadir)
- 磁場モデル: IGRF-14 (球面調和展開 degree 13)
- RW: 3軸直交, Iw = 0.01 kg·m², max momentum = 1.0 N·m·s
- MTQ: 3軸直交, max moment = 10.0 A·m²
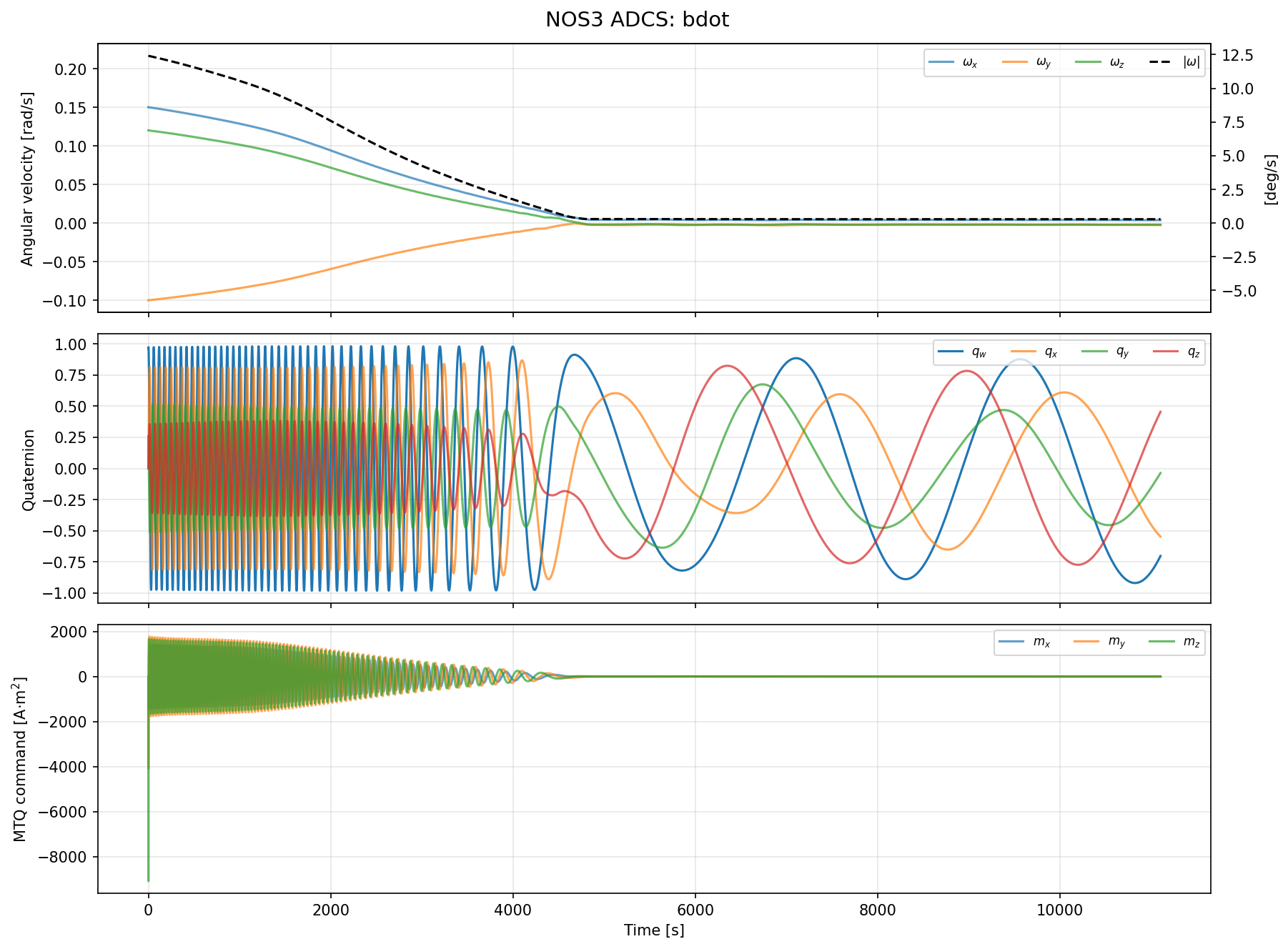
B-dot Detumbling (2 orbits, ~3h)
Section titled “B-dot Detumbling (2 orbits, ~3h)”初期角速度: ω = [0.15, -0.10, 0.12] rad/s (~12.5 deg/s, 分離直後のタンブリング状態)
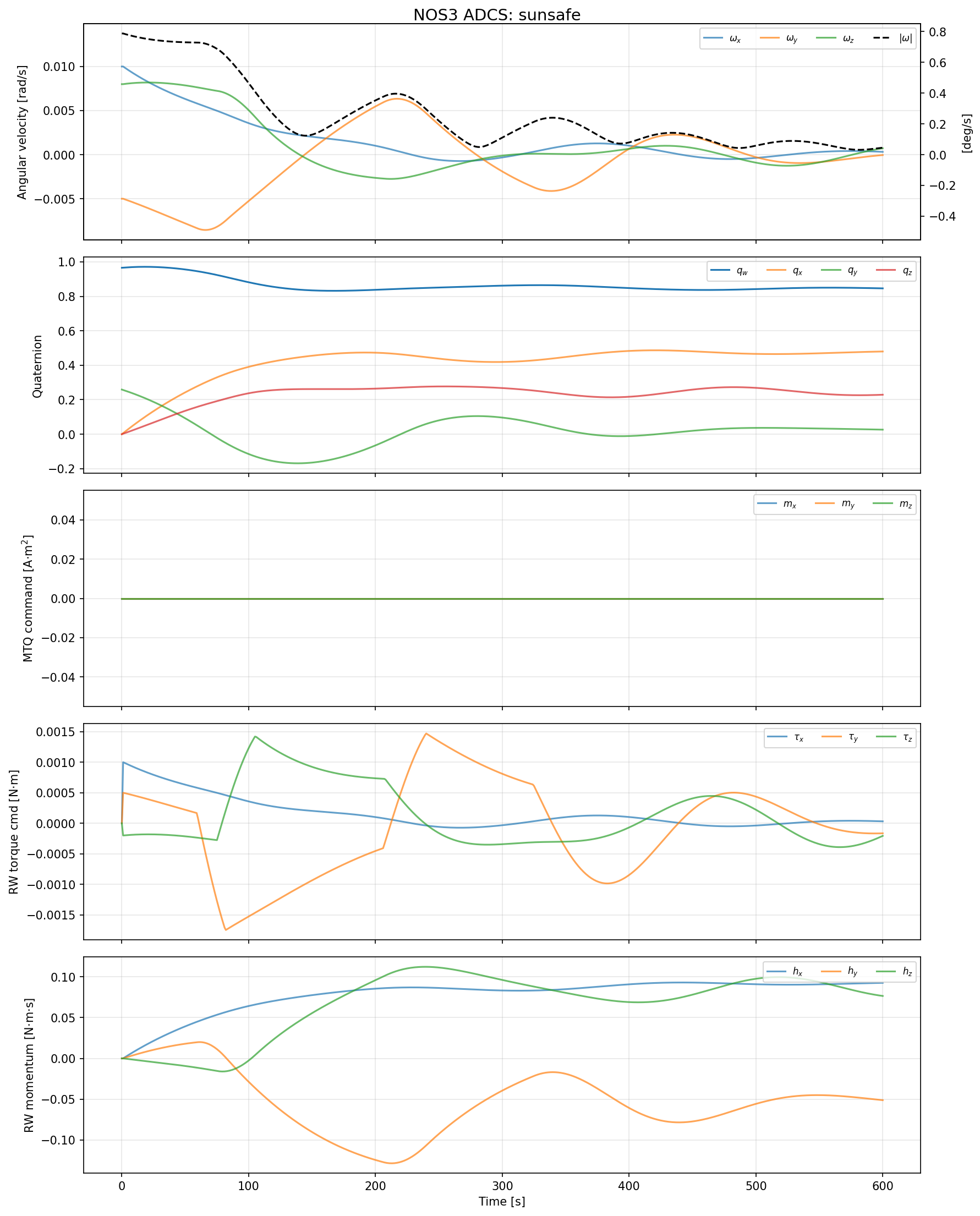
Sun-Safe Pointing (600s, post-detumble ω)
Section titled “Sun-Safe Pointing (600s, post-detumble ω)”初期角速度: ω = [0.01, -0.005, 0.008] rad/s (~0.8 deg/s, B-dot デタンブリング後を想定)
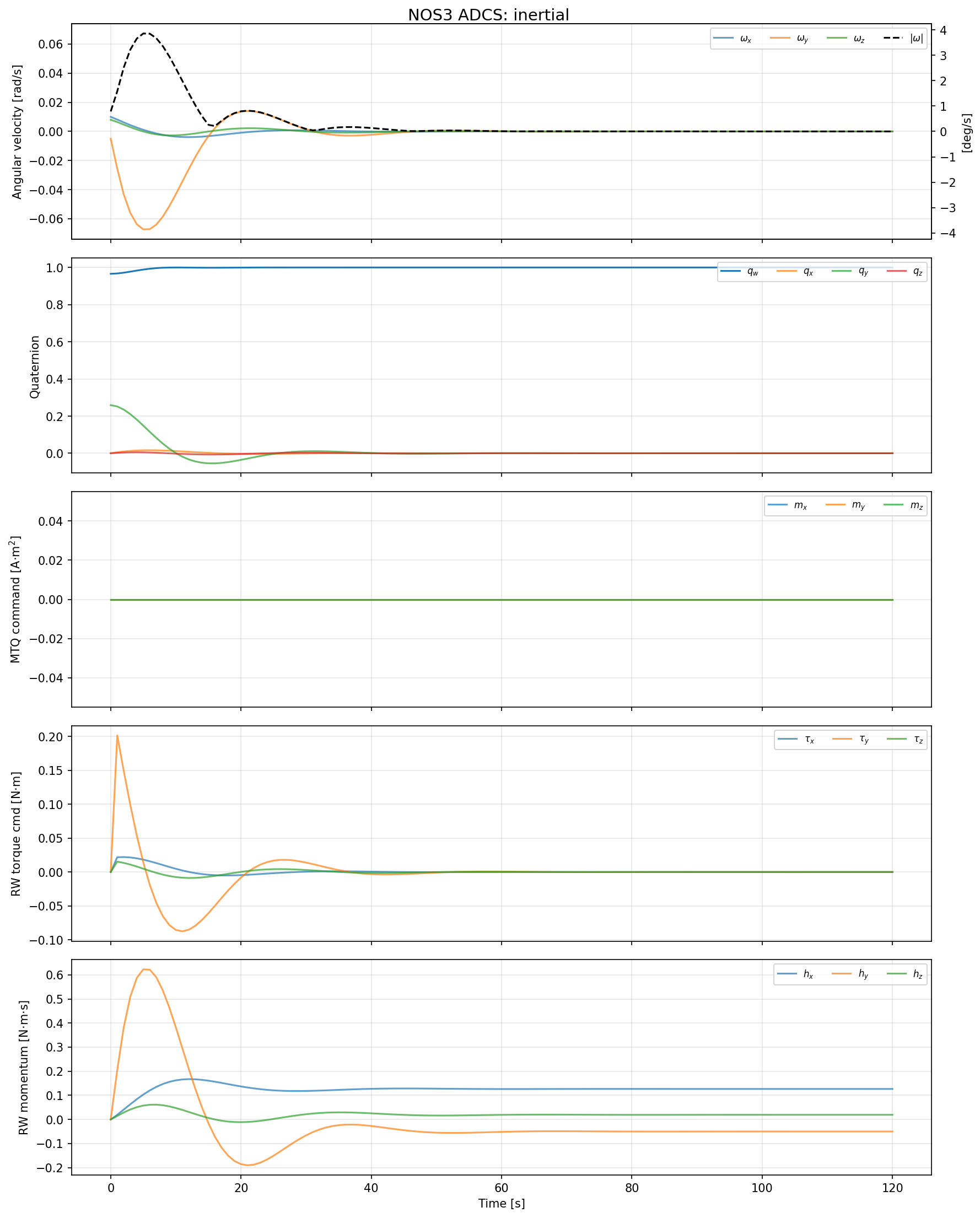
Inertial 3-axis Control (120s, post-detumble ω)
Section titled “Inertial 3-axis Control (120s, post-detumble ω)”初期角速度: ω = [0.01, -0.005, 0.008] rad/s (~0.8 deg/s, B-dot デタンブリング後を想定)
手動でプロットを生成する場合
Section titled “手動でプロットを生成する場合”# CSV を生成orts run --format csv --output stdout > result.csv
# プロット (uv + matplotlib)uv run python3 plot.py result.csvuv run python3 plot.py result.csv --save output.png --title "B-dot Detumbling"角速度・クォータニオン・MTQ コマンド・RW トルク・RW モメンタムの時系列を表示する。
Configuration
Section titled “Configuration”orts.toml の [satellites.controller.config] で制御パラメータを指定する:
[satellites.controller.config]sample_period = 1.0 # 制御サンプル周期 [s]initial_mode = 1 # 初期モード (0=Passive, 1=B-dot, 2=Sun-Safe, 3=Inertial)momentum_management = false
# B-dot parametersbdot_kb = 1e4bdot_b_range = 1e-9
# Sun-Safe parameters (PD)sunsafe_kp = [0.01, 0.01, 0.01]sunsafe_kr = [0.1, 0.1, 0.1]sunsafe_sside = [1.0, 0.0, 0.0] # 太陽指向軸 (body frame)sunsafe_vmax = 0.01
# Inertial parameters (PID)inertial_kp = [0.1, 0.1, 0.1]inertial_kr = [1.0, 1.0, 1.0]inertial_ki = [0.0, 0.0, 0.0]inertial_phi_err_max = 1.0inertial_qbn_cmd = [0.0, 0.0, 0.0, 1.0] # 目標クォータニオン (scalar-last)Architecture
Section titled “Architecture”flowchart TB
subgraph host["orts host (Rust)"]
sim["Simulation loop<br/>RK4 integrator + sensors"]
cmd["Apply commands<br/>RW motor torque / MTQ dipole"]
end
subgraph wasm["WASM Component"]
wrapper["Rust wrapper<br/>Plugin<TickInput, Command>"]
mapping_in["populate_di()<br/>orts sensors → NOS3 DI struct<br/>quaternion: [w,x,y,z] → [x,y,z,w]"]
adac["generic_adcs_adac.c<br/>(NASA C code, unmodified)"]
mapping_out["GNC→Command<br/>Tcmd → RwCommand::Torques<br/>Mcmd → MtqCommand::Moments"]
end
sim -- "TickInput<br/>(sensors, actuator telemetry)" --> wrapper
wrapper --> mapping_in --> adac --> mapping_out
mapping_out -- "Command" --> cmd
cmd --> sim
Offline Build
Section titled “Offline Build”ネットワークなしでビルドする場合は、事前に generic_adcs を clone して環境変数で指定:
git clone https://github.com/nasa-itc/generic_adcs.git /path/to/generic_adcsGENERIC_ADCS_SRC_DIR=/path/to/generic_adcs cargo component buildKnown Limitations
Section titled “Known Limitations”- B-dot モードのみ E2E テスト (test.sh) あり。Sun-Safe / Inertial は手動確認済み
- CSS (Coarse Sun Sensor) のスカラー出力は方向ベクトルに変換できないため、 FSS (Fine Sun Sensor) のみ対応
- 3-axis 直交アクチュエータ配置を前提
- ライセンス: NOS3 は NOSA 1.3 (推定)。C ソースは orts リポジトリに含まれず、 ビルド時に git clone で取得するため再配布には該当しない
Credits
Section titled “Credits”- NASA NOS3 — NASA Operational Simulator for Space Systems
- generic_adcs — Generic ADCS component for NOS3