

PD 姿勢制御 + RW
PD 姿勢制御コントローラの WASM Component ゲストプラグイン。スタートラッカ (STT) とジャイロスコープのセンサ読み値から姿勢誤差を計算し、リアクションホイール (RW) にトルク指令を出す。
Left-invariant quaternion error による PD 制御:
ゲストは Command::RwTorque(τ) を返し、ホスト側の ReactionWheelAssembly が各ホイール軸への投影・飽和処理を行う。
cargo install cargo-component # 未インストールの場合rustup target add wasm32-wasip1 --toolchain 1.91.0
cd plugin-sdk/examples/pd-rw-controlcargo +1.91.0 component build --release出力: target/wasm32-wasip1/release/orts_example_plugin_pd_rw_control.wasm
シミュレーション実行
Section titled “シミュレーション実行”TOML config でシミュレーションを実行:
cd plugin-sdk/examples/pd-rw-controlorts run --format csvorts.toml に宇宙機パラメータ、WASM プラグインパス、センサ、RW を全て記述。Rust の再コンパイルなしに .wasm と config だけで制御則を差し替えられる。
初期姿勢誤差 30°(複合軸)、初期角速度あり、重力傾斜外乱込みで 120 秒のシミュレーション。
cd plugin-sdk/examples/pd-rw-controluv run plot.pyJSON config blob で初期化:
{ "kp": 1.0, "kd": 2.0, "target_q": [1, 0, 0, 0], "sample_period": 0.1}kp: 比例ゲイン(デフォルト 1.0)kd: 微分ゲイン(デフォルト 2.0)target_q: 目標姿勢クォータニオン[w, x, y, z](デフォルト identity)sample_period: 制御サンプル周期 [s](デフォルト 0.1)
シミュレーション結果
Section titled “シミュレーション結果”初期姿勢誤差 30°(複合軸)+ 初期角速度あり、重力傾斜外乱込みで 120 秒間のシミュレーション:
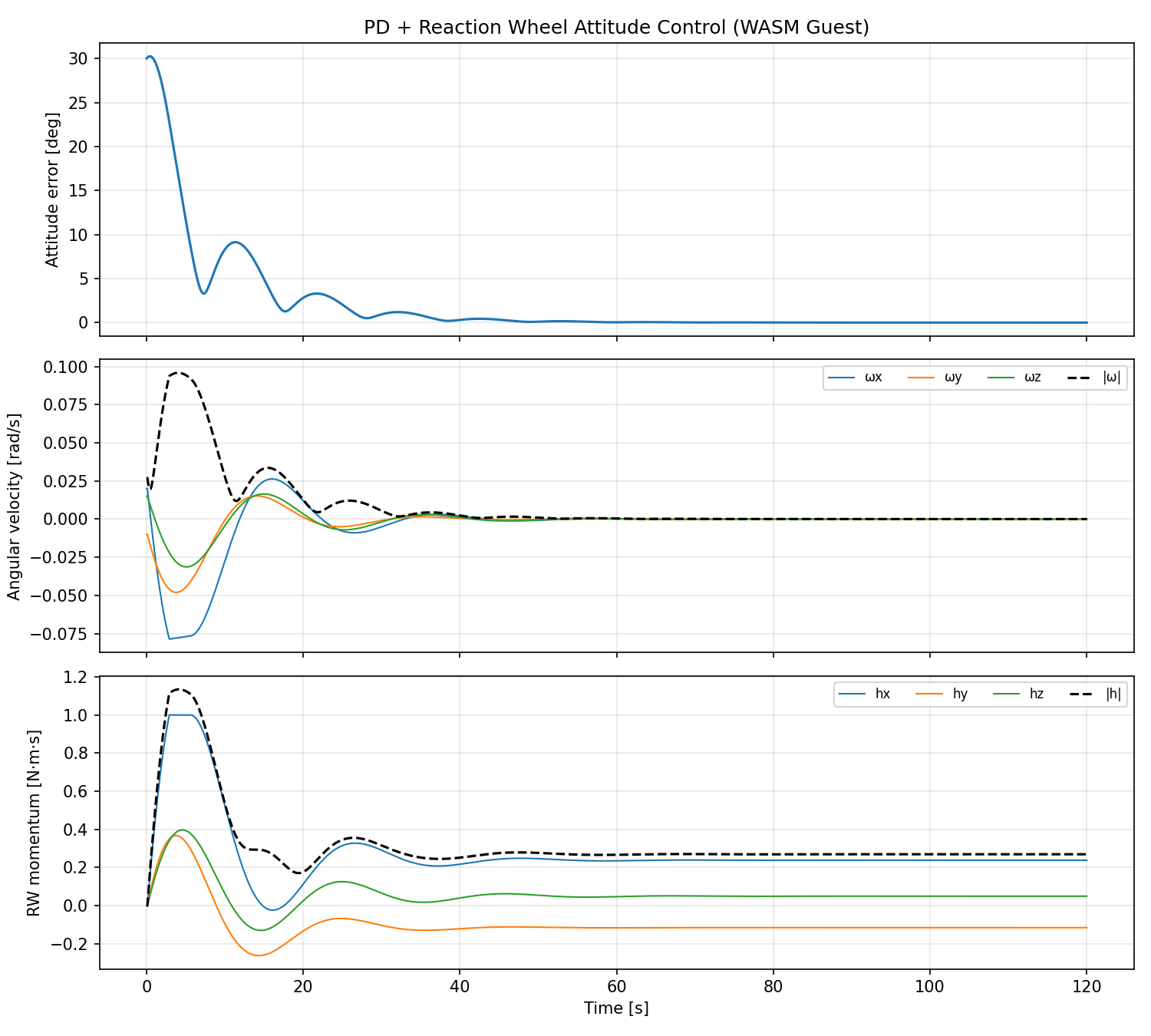
- 上段: 姿勢誤差 [deg] — 30° から急速に収束、20 秒以内に <1°
- 中段: 角速度 [rad/s] — 振動しながら減衰、60 秒で整定
- 下段: RW 角運動量 [N·m·s] — GG 外乱により緩やかに蓄積(unloading 未実装)
Oracle テスト
Section titled “Oracle テスト”native PD+RW 実装と WASM ゲストの比較テスト:
cargo test -p orts --features plugin-wasm --test oracle_plugin_wasm_pd_rwwasm_pd_rw_matches_native: native と WASM が 1e-4 以内で一致(quaternion 乗算の浮動小数点演算順の差が 60 秒で蓄積)wasm_pd_rw_converges: 初期 10° → <1° に収束、角速度 <0.01 rad/s
ゲストは以下のセンサ読み値を使用(ホスト側 SensorBundle が tick ごとに評価):
| センサ | 型 | 用途 |
|---|---|---|
star_tracker | AttitudeBodyToInertial | 姿勢クォータニオン(誤差計算) |
gyroscope | AngularVelocityBody | 角速度(微分項) |
センサが未設定の場合、ゲストはエラーを返す(暗黙のフォールバックなし)。
- RW momentum unloading(磁気トルカによるデサチュレーション)
- 可視化プロット (
plot.py) - RRD 出力対応(現在は CSV 直接出力)